Force + moment — no payload mass in sim
54 % body-attached · 36 % arm-extended
· 10 % isotropic
Policy yields trunk & pelvis
No force sensor · No retraining at deployment
Act 2 —
Method
Training Setup
8192
parallel envs MuJoCo
PPO
standard no distillation
30 Hz
depth CNN 4-frame stack
50 Hz
policy freq. on hardware
20 k
training iterations
0-shot
sim-to-real no fine-tuning
No teacher-student staging · Asymmetric actor-critic
· Domain randomization for sim-to-real gap
Act 3 —
Simulation
SIMULATION RESULTS — Payload Generalization
Baseline · no load
Front · 5 kg
Rear · 5 kg
Act 3 —
Simulation
SIMULATION RESULTS — Challenging Scenarios
Front + Rear · 10 kg
Basket · 5 kg
Car Door · ~5 kg
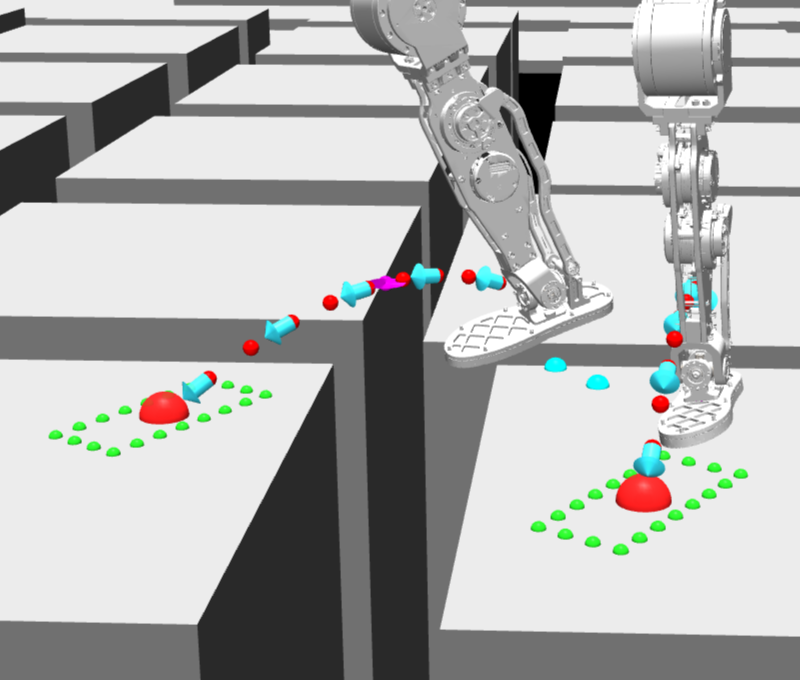
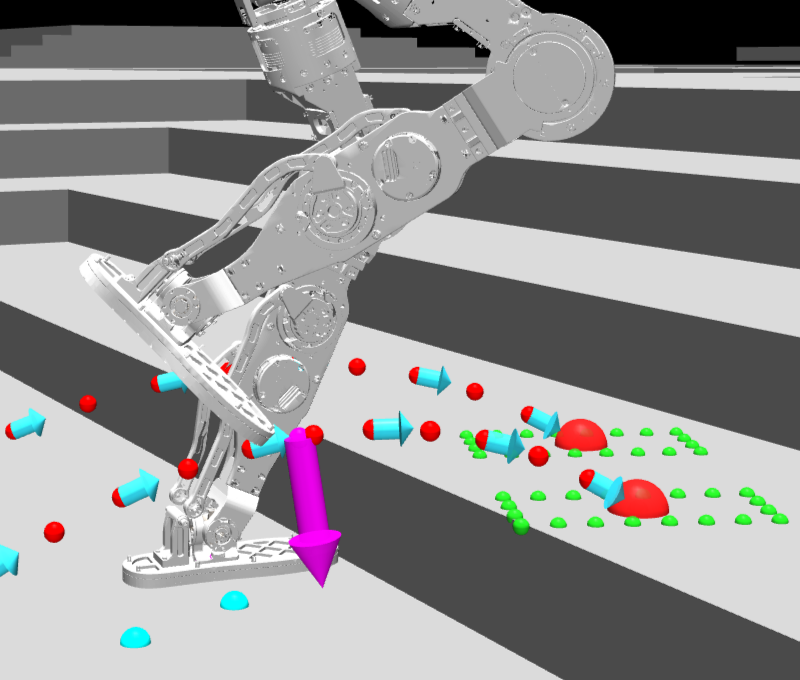
Act 4 — Real Robot
Real Robot · Zero-shot from
simulation
Stair traversal · risers up to
0.20 m · 1.0 m/s
Act 4 — Real Robot
Real Robot · Moment-dominated
load
Wrist-mounted tray · 7 kg
(hardware demo)
Sim wrist +10 kg: 65% SR
vs. 50% baseline
Act 4 — Real Robot
20 kg
Full expedition backpack
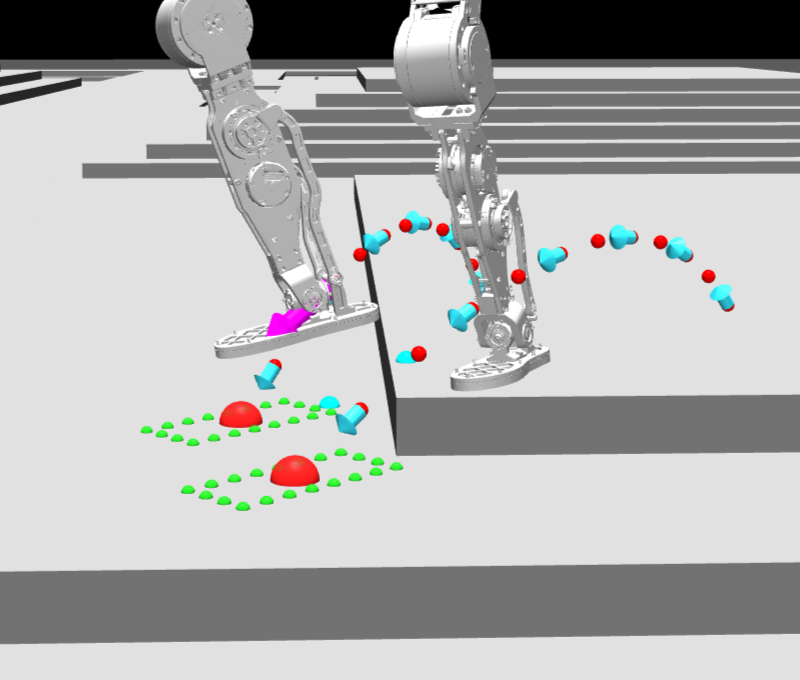
Real Robot · Zero-shot
Rear-mounted backpack, 20 kg ·
descending stairs
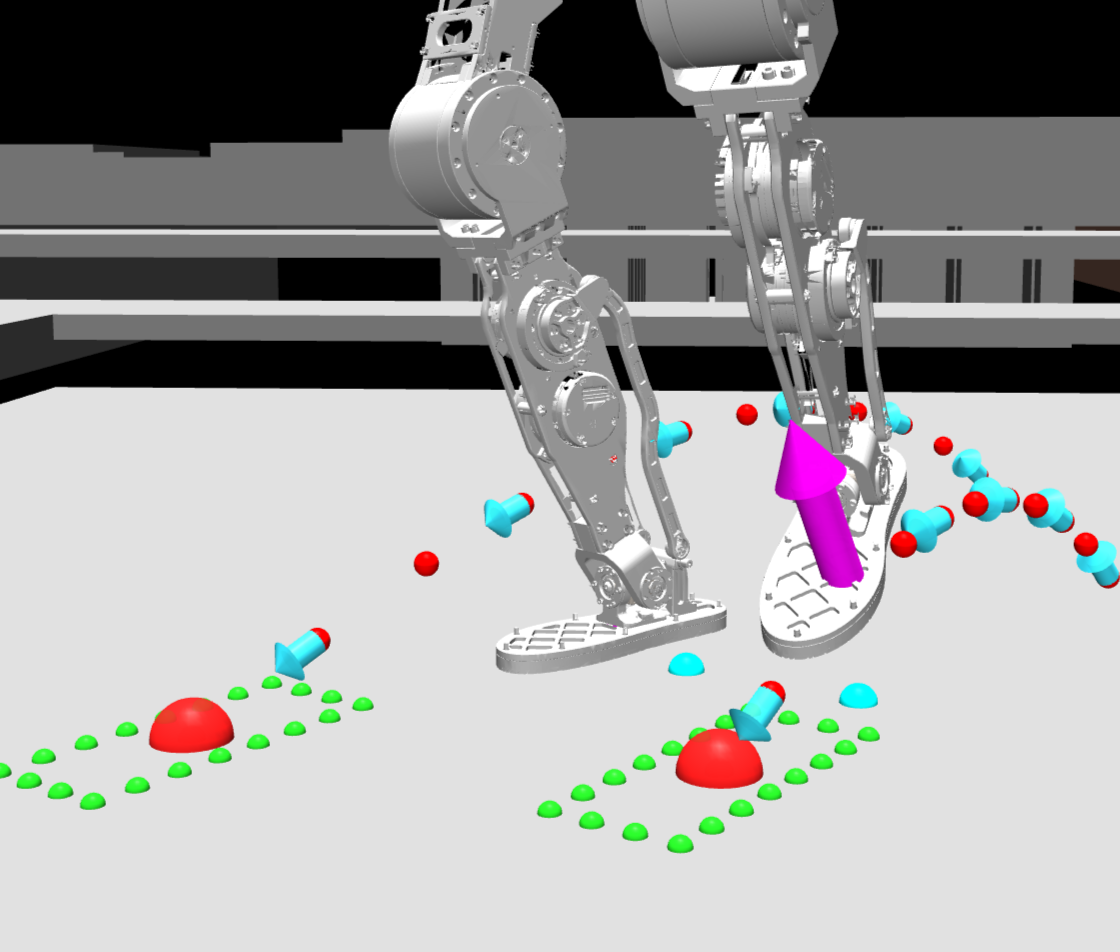
Act 4 — Real Robot
Real Robot · Zero-shot
20 kg backpack · ascending
stairs
Act 5 — Results
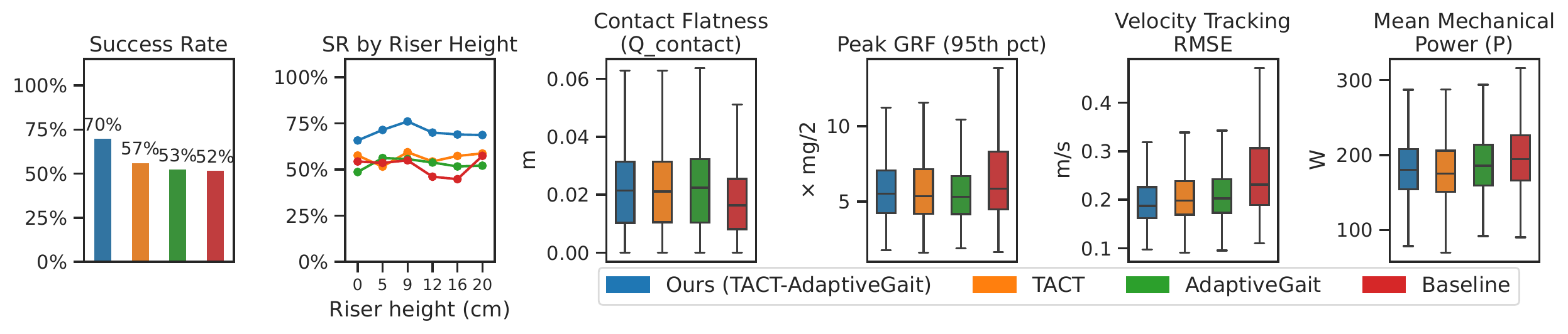
Terrain Traversal: Success Rate
Standard terrain (0.05–0.20 m risers)
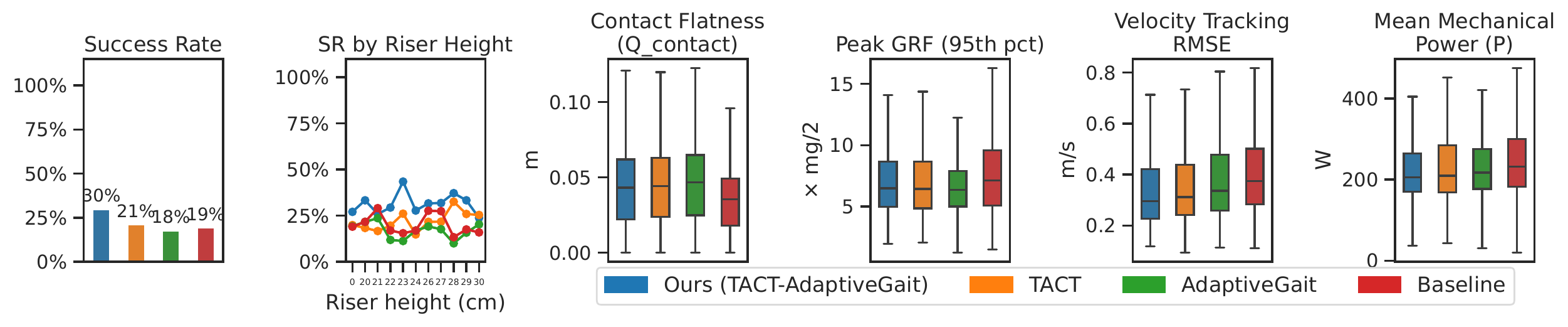
Hard terrain, OOD (0.20–0.30 m risers)
70%
standard
SR (ours)
+13 pp
vs.
TACT-only
+17 pp
vs.
adaptive gait only
On hard terrain, adaptive gait alone drops to
18% —
below the blind baseline (19%). Re-timing without foothold
guidance is actively harmful at kinematic limits.
Act 5 — Results
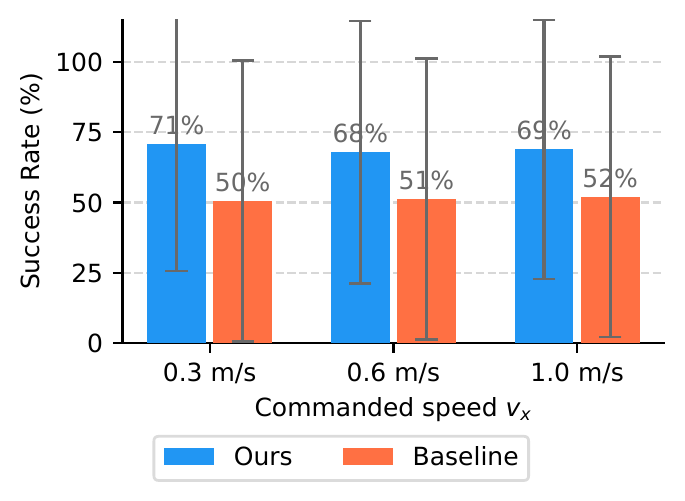
Terrain Traversal: Foothold Quality
SR vs. commanded speed — gap is
speed-invariant
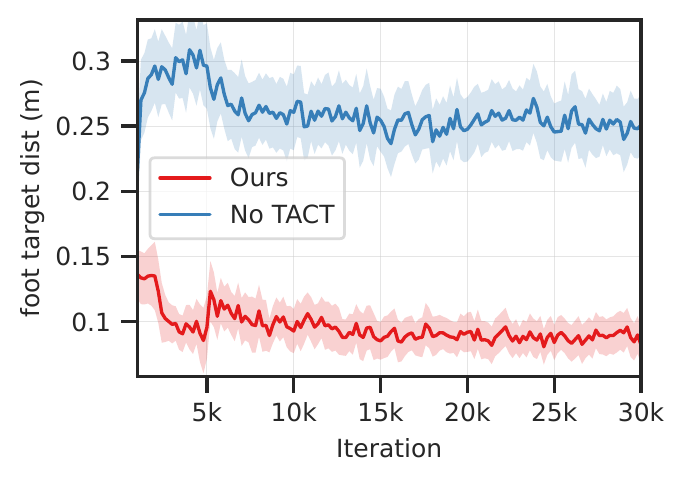
Foot-target distance during training
2.8×
foot-target without TACT
The success rate gap is speed-invariant from 0.5
to 1.0 m/s.
Without terrain guidance, foot-target distance during training is
2.8×
larger. The terrain cost signal is the operative variable.
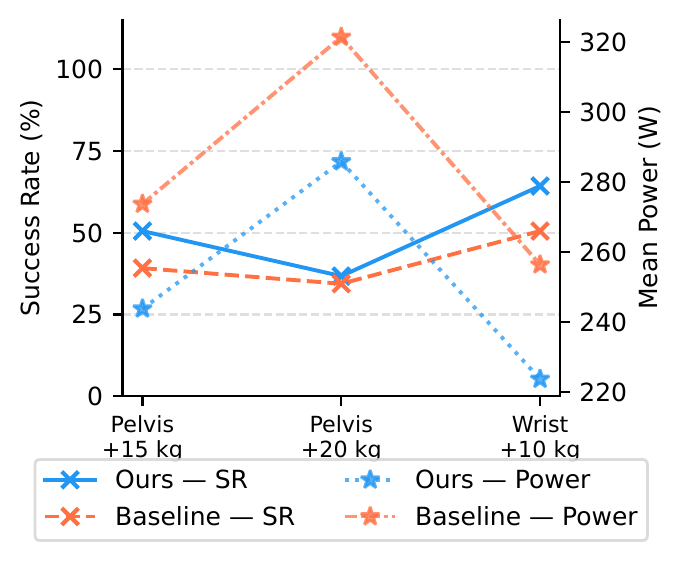
Act 5 — Results
Payload Generalization — Zero-Shot
SR (%) and mean power (W) vs. payload
condition on stairs
Pelvis +15 kg — moderate centered load 50% vs. 38% SR · 247 vs. 277 W
Compliance absorbs the downward wrench.
Pelvis +20 kg — near distribution boundary
~37% vs. ~35% SR (parity) · 293 vs. 320 W
−27 W retained: partial compliance preserved.
Wrist +10 kg ✦ largest margin 65% vs. 50% SR · 223 vs. 259 W
Arm-extended wrench samples target moment-dominated loads
directly.
Act 5 — Results
Limitations
Quantitative ablations in simulation only —
hardware results are qualitative; absolute real-world SR
uncharacterised
Hard-terrain SR only 30% on risers 0.22–0.28 m
—
insufficient for reliable deployment on tall staircases
Compliance ceiling ~20 kg centered; lateral,
distributed & swinging loads fall outside the sampled wrench
space
DCM planner requires accurate elevation-map registration —
no fallback under localization drift; forward
camera only
Tangent-guided orientation fails on slopes >~15° — arc
tangent
≠ surface normal → toe/heel contact, narrowed friction cone
Next: quantitative real-world evaluation · terrain ×
payload coupling study
TACTful
Standard PPO · Zero-shot sim-to-real ·
Service humanoid
Multi-Channel Terrain CostCompliance Without Force SensorsZero-Shot Sim-to-Real